Overview
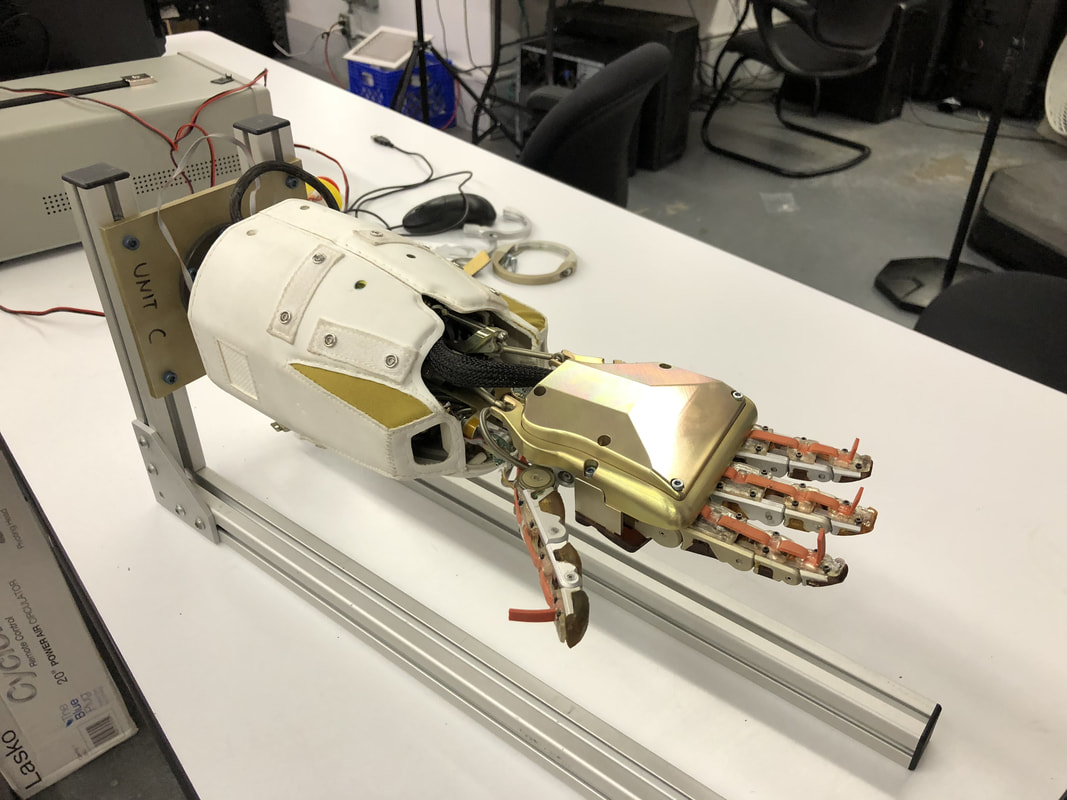
As a student researcher in NU’s RIVeR (Robotics and Intelligent Vehicles Research) Laboratory, I was initially tasked with organizing a team to design a concept for a new forearm, wrist, and hand for NASA’s R5 (Valkyrie) robot.
The concept replaces the humanoid design with an active tool change mechanism in the wrist, enabling Valkyrie to attach and detach with multiple “hands,” each with a specialized purpose.
Wrist
My colleague Peter Groen and I designed a concept for the new wrist interface featuring a series of pockets around a cylindrical base, into which pins would be inserted by the wrist to lock it in place.
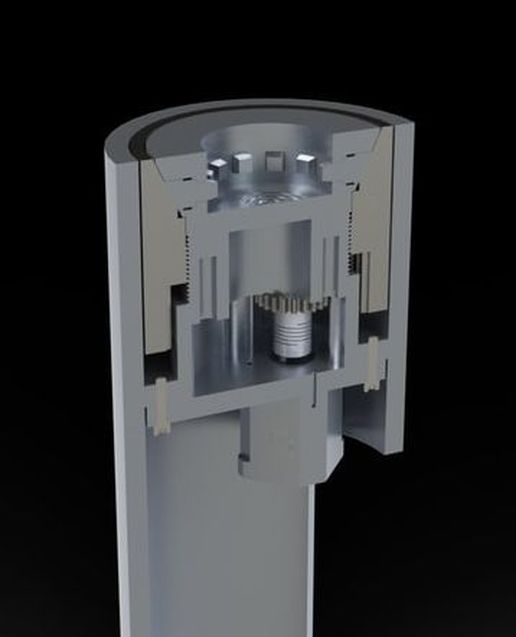 Wrist Cutaway
Wrist Cutaway
Electrical power and data would interface through the center of the cylinder by means of an orientation-neutral connector.
The locking mechanism uses a single motor and features a conical actuator ring which depresses the pins into place while it rotates and slides up on its threads, while remaining robust enough to enable Valkyrie to manipulate heavy objects.
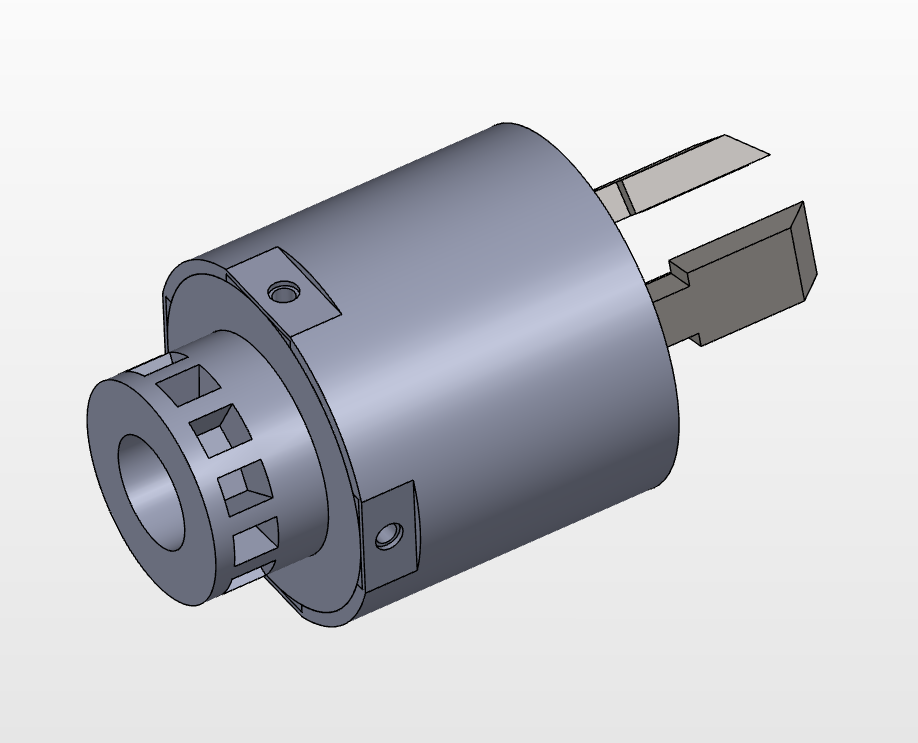 New gripper concept, featuring standard wrist interface
New gripper concept, featuring standard wrist interface