Overview
This was a 6 month design effort by a team of five Northeastern University Mechanical Engineering students: Matthew Bonanni, Max Choate, David Coven, Bryant Grey-Stewart, and Ryan Loehr.
My specific contributions encompassed initial requirements analysis, mechanical design of structural components (particularly bearing structures for actuators), and kinematic modeling software.
Abstract
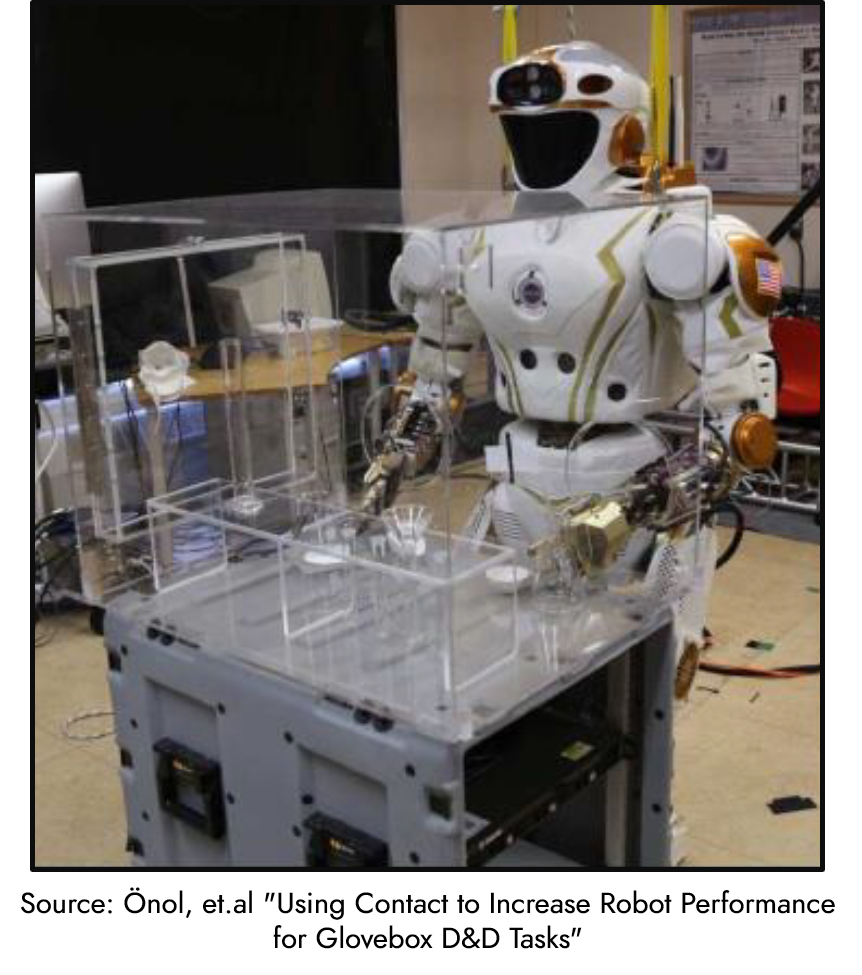
The manipulation of hazardous materials within a glovebox is a promising application of humanoid robotics. NASA R5 “Valkyrie” is an excellent candidate for this task; however, the constraints of a glovebox limit the volume in which Valkyrie’s existing hardware can effectively operate.
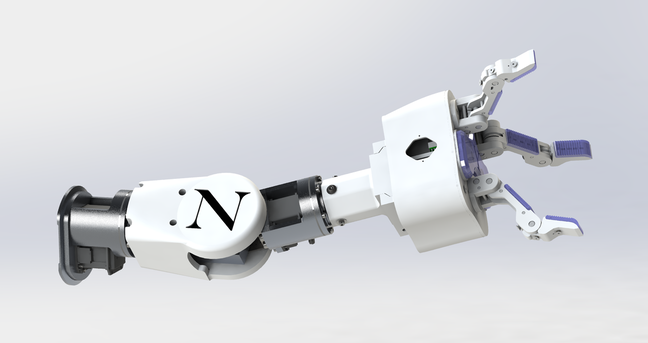
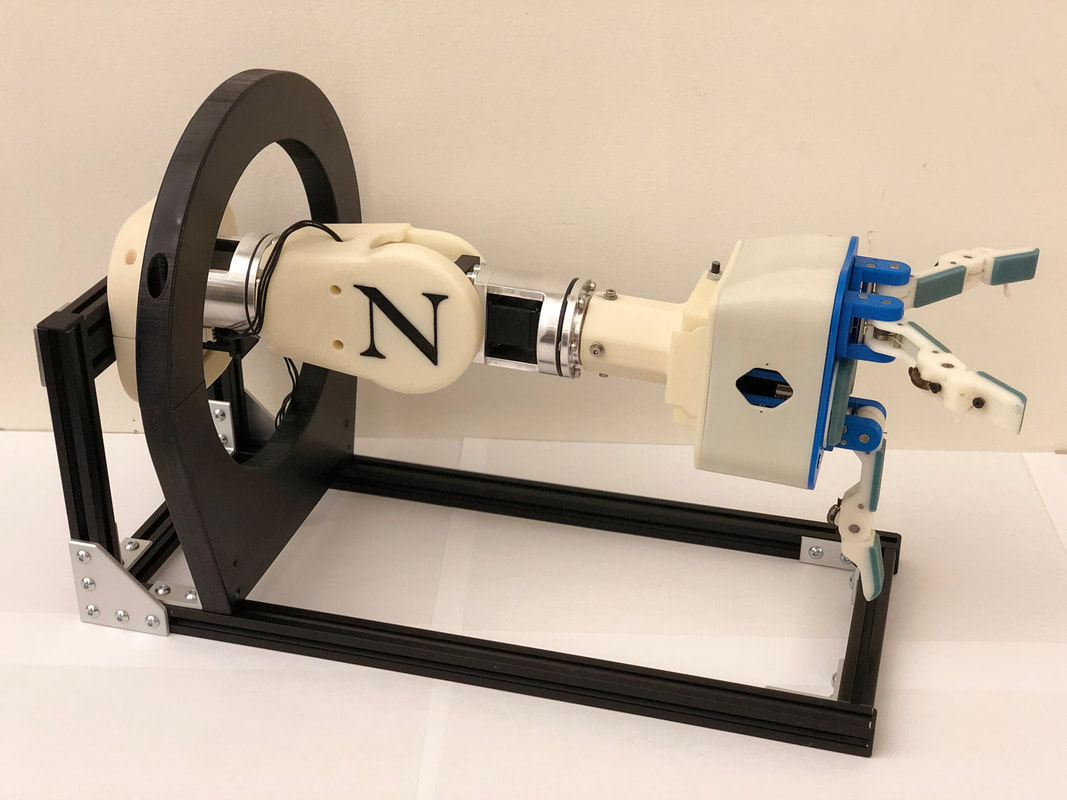
This project presents assessment of Valkyrie’s current forearms and introduces a newly designed forearm optimized for glovebox environments. This design accommodates the Yale OpenHand end effector through compatible mounting. The innovative kinematic configuration increases Valkyrie’s glovebox range of motion by more than tenfold while meeting payload and weight specifications.